لنكن صادقين — عندما يرتجف روبوت بشري الشكل في وضع ثابت، فإن معظم الفرق تلقي باللوم على البرنامج أولاً.
ولكن في التصنيع باستخدام الحاسب الآلي للروبوتات البشرية, ، يمكن أن تؤدي الأخطاء الصغيرة في البيانات والملاءمة إلى حدوث تموجات احتكاك وردود فعل سلبية دقيقة لا يمكن لأي جهاز تحكم إخفاؤها تمامًا.
لقد قمت بضبط حلقة العزم، وصقل مكاسب PID، والتحقق من صحة حركتك في المحاكاة. ثم يتخذ الروبوت البشري الخاص بك وضعية ثابتة — ويبدأ الذراع في الاهتزاز. أول ما يخطر على البال هو البرمجيات: ضوضاء المشفر، رد فعل المحرك، عرض النطاق الترددي لوحدة التحكم، التصفية.
ولكن في الأنظمة البشرية الحقيقية، غالبًا ما يكون اهتزاز المفاصل هو حلقة التحكم التي تكافح أخطاء الأجهزة التي تكون “صغيرة على الورق” ولكنها ضخمة في علم الحركة.

خبير في التصنيع باستخدام الحاسب الآلي يتمتع بخبرة تزيد عن 15 عامًا. يساعد ويليام الفرق الهندسية على تحويل النماذج الأولية إلى أجزاء إنتاج مستقرة من خلال تحسين سوق دبي المالي، وتخطيط التفاوتات، واختيار استراتيجية التصنيع الآلي، ومراقبة الجودة القائمة على الفحص.
william@hdproto.comبالنسبة لأي جزء مُصنَّع بنظام التحكم الرقمي - سواءً كانت أعمدة أو علب أو أقواس أو أقواس أو مشعبات أو مكونات هيكلية - يبدأ أساس التصنيع الموثوق به به بهندسة نظيفة ومساند محددة جيدًا وميزات ملائمة للتصنيع الآلي تقلل من مخاطر إعادة التثبيت.
نحن ندعم التفاوتات المسموح بها حسب الوظيفة (حتى ± 0.01 مم عند الحاجة) ونقدم خيارات فحص كاملة بما في ذلك تقارير CMM ومقاييس اللولب والتحقق من تشطيب السطح لضمان إمكانية التكرار من النموذج الأولي إلى الإنتاج.
اتصل بخبيرنا الآنفي شركة دونغقوان هواده للتصنيع الدقيق المحدودة., ، نحن ندعم فرق الروبوتات من خلال تصنيع أجزاء الروبوتات البشرية باستخدام آلات التصنيع باستخدام الحاسب الآلي (CNC) — خاصةً أغطية المشغلات ومقاعد المحامل ووصلات الإخراج والواجهات الدقيقة التي تحدد ما إذا كان المفصل يبدو “حيًا” أم “متوترًا”.”
ملخص تقني سريع (للمهندسين ومحركات البحث)
يركز هذا المقال على الأسباب الجذرية الميكانيكية لاهتزاز المفاصل في مفاصل الروبوتات البشرية وكيف تقللها المعالجة الدقيقة باستخدام الحاسب الآلي، بما في ذلك: استراتيجية GD&T datum، تركز/انحراف تجويف المحمل، تصنيع خماسي المحاور بإعداد واحد، فحص CMM، تأثيرات التمدد الحراري على التداخلات، وتصنيع الجدران الرقيقة بسرعة عالية. لتخفيف الوزن.
المشكلة الحقيقية: “أشباح الأجهزة” التي تبدو جيدة في الرسومات
المكدس المشترك النموذجي ليس ميزة واحدة، بل هو سلسلة:
مقعد المحمل → واجهة عمود المحرك → محرك متناسق / حامل علبة التروس → وصلة الإخراج
عندما تكون إحدى الواجهات منحرفة قليلاً عن المحور أو غير مستوية، يمكن أن يظل المفصل “مُجمَّعًا”، ولكنه لن يعمل بسلاسة. ثم يقوم جهاز التحكم بالتعويض في الوقت الفعلي، وما تلاحظه على أنه اهتزاز غالبًا ما يكون ارتباطًا ميكانيكيًا أو رد فعل خلفيًا دقيقًا أو انحرافًا في الملاءمة بسبب درجة الحرارة.
فيما يلي ثلاثة “أشباح الأجهزة” التي نراها مرارًا وتكرارًا في مشاريع تصنيع الروبوتات البشرية — وكيفية إزالتها.
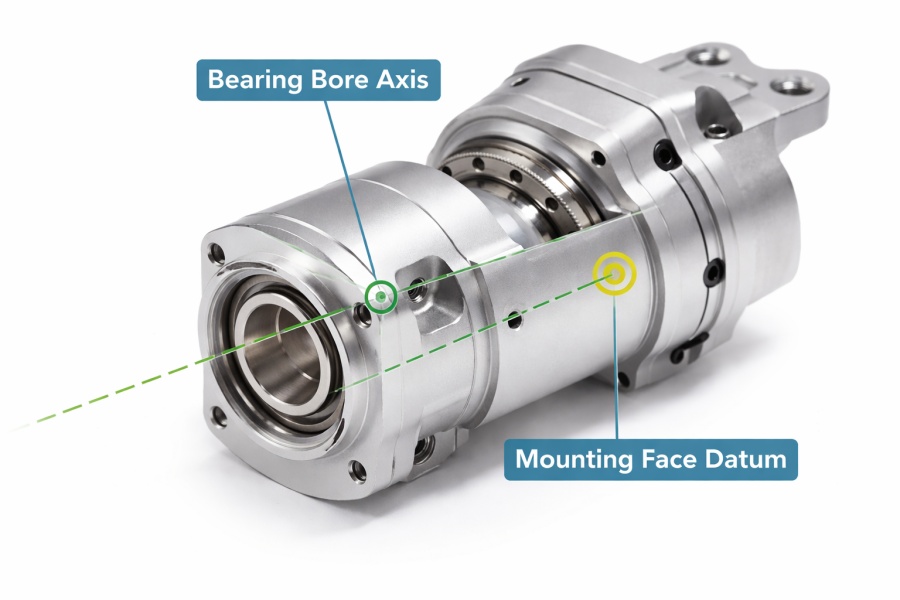
Ghost #1: أخطاء التراص (حيث يلتقي GD&T مع علم الحركة)
تتعامل معظم المتاجر مع الثقب على أنه ميزة منفصلة: “Ø20 H7، مسمار مناسب، انتهى”. في الأطراف البشرية ذات درجة الحرية العالية، يعتبر نفس الثقب عنصرًا مهمًا في سلسلة حركية دقيقة.
ما الذي يحدث خطأ
حتى وجود اختلاف بسيط بين محور تجويف المحمل ووجه التثبيت يمكن أن يؤدي إلى:
- احتكاك غير مركزي أثناء الدوران
- تموج العزم الدوري
- الاحتكاك غير الخطي (الانزلاق) الذي يؤدي إلى تذبذبات في التحكم
قد ترى أن المفصل يعمل “بشكل جيد” في منطقة ما ويهتز في منطقة أخرى لأن الخطأ هندسي وليس خوارزمي.
الأعراض الشائعة التي يلاحظها المهندسون
- الارتفاعات الحالية لا تتطابق مع المحاكاة (يلزم عزم دوران إضافي للتغلب على الالتصاق)
- تذبذب منخفض التردد تحت الحمل (حلقة التحكم تقاوم تغير الاحتكاك الميكانيكي)
- عمر محمل قصير (حمل غير طبيعي بسبب عدم المحاذاة)
كيف نقوم بتصنيعها في Huade
نحن لا نقوم بتصنيع “الثقوب”. نحن نقوم بتصنيع أنظمة البيانات.
تصنيع بإعداد واحد للمواعيد الحرجة
بالنسبة للأجزاء مثل أغطية المشغلات، نفضل تصنيع فتحات المحامل وأسطح التثبيت وأخاديد السدادات وخصائص المحاذاة في إعداد أحادي بخمسة محاور كلما أمكن ذلك. فكلما قل عدد عمليات إعادة التثبيت، قل عدد الأخطاء المركبة.
التحقق من CMM المرتبط بـ GD&T الخاص بك
نقوم بفحص الهندسة وفقًا لغرض الرسم — خاصة العلاقات المهمة في مفاصل الروبوت (المحور إلى الوجه، الوجه إلى الوجه، التجويف إلى التجويف). إذا كان الرسم الخاص بك يشير إلى ASME Y14.5 GD&T، فإننا نوائم استراتيجية الفحص مع هذا الغرض.
نصيحة عملية: إذا كان المفصل يرتجف في وضع ثابت، تحقق من محاذاة محور التجويف، عموديّة/استواء أسطح التثبيت، والتمايل/التركيز قبل إعادة كتابة الكود.
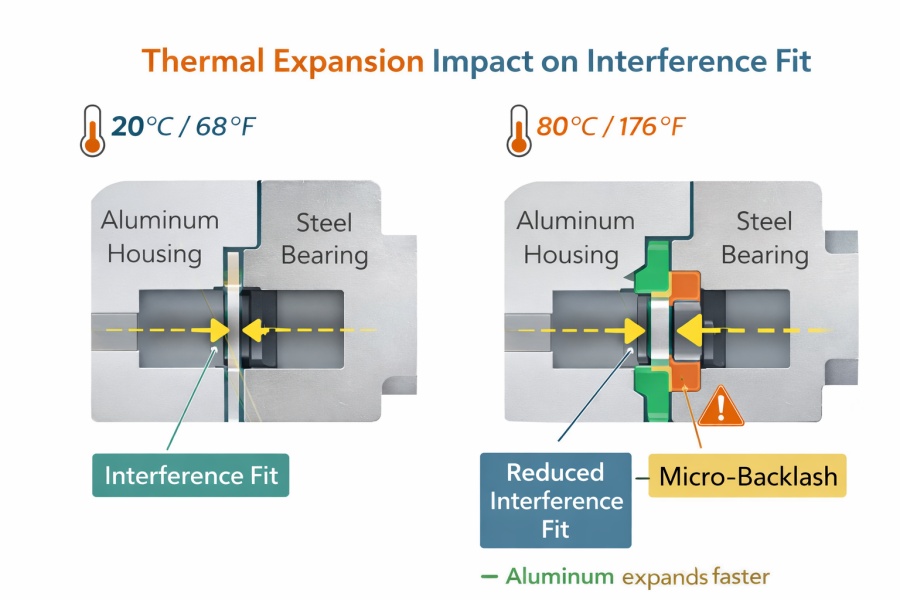
Ghost #2: الانحراف الحراري (التداخلات التي لا تبقى تداخلات)
المفاصل البشرية كثيفة حرارياً. تولد المحركات والمحركات حرارة بسرعة، ويمكن أن ترتفع درجة حرارة العلب المغلقة أثناء الحركة المستمرة.
ما الذي يحدث خطأ
قد يتغير الملاءمة بالضغط التي تبدو مثالية في درجة حرارة الغرفة بمجرد ارتفاع درجة حرارة الوصلة. يتوسع الألومنيوم والصلب بمعدلات مختلفة، مما قد يؤدي إلى تحويل الملاءمة المحكمة إلى رد فعل عكسي دقيق — أو تغيير الحمل المسبق بدرجة كافية لتغيير سلوك الاحتكاك.
كيف يبدو في الاختبار
- الروبوت يشعر “بالاستقرار” عندما يكون باردًا
- يظهر الاهتزاز بعد الإحماء أو أثناء الدورات المتكررة
- يختلف الأداء بين الجلسات حتى مع وجود إعدادات تحكم متطابقة
كيف نحد من مخاطر التوافق الحراري
مراجعة DFM التي تطرح أسئلة فيزيائية
بدلاً من اتباع تفاوت PDF بشكل أعمى، نسأل:
- ما هو نطاق درجة الحرارة المشتركة المقدرة؟
- هل يوجد مقعد المحمل في تجويف مشبع بالحرارة أو بالقرب من الجزء الثابت للمحرك؟
- هل الغرض من الملاءمة هو الحفاظ على التحميل المسبق، أو منع الزحف، أو التحكم في الحركة الدقيقة؟
خيارات استراتيجية الملاءمة (حسب البنية الخاصة بك)
بناءً على استراتيجية التجميع والخدمة الخاصة بك، يمكننا تقديم الدعم في المجالات التالية:
- مراقبة أكثر صرامة لحجم التجويف والاستدارة لتثبيت سلوك الضغط
- استراتيجيات تشطيب الأسطح لتقليل الانزلاق الدقيق
- تعديلات التصميم (عند الاقتضاء) لجعل الملاءمة مستقرة عبر درجات الحرارة
مساعدة حرارية سلبية دون زيادة في الوزن
بالنسبة لبعض علب المحركات، تختار الفرق إضافة ميزات ميكرو-فين الخارجية المدمجة لزيادة مساحة السطح للتبريد السلبي — بدون حوامل إضافية، وبدون وزن إضافي للتجميع — فقط هندسة أكثر ذكاءً.
نصيحة عملية: إذا ظهرت اهتزازات “بعد الإحماء”، تعامل معها على أنها مشكلة حرارية ميكانيكية أولاً، وليس مشكلة في جهاز التحكم.
خبير في التصنيع باستخدام الحاسب الآلي يتمتع بخبرة تزيد عن 15 عامًا. يساعد ويليام الفرق الهندسية على تحويل النماذج الأولية إلى أجزاء إنتاج مستقرة من خلال تحسين سوق دبي المالي، وتخطيط التفاوتات، واختيار استراتيجية التصنيع الآلي، ومراقبة الجودة القائمة على الفحص.
william@hdproto.comبالنسبة لأي جزء مُصنَّع بنظام التحكم الرقمي - سواءً كانت أعمدة أو علب أو أقواس أو أقواس أو مشعبات أو مكونات هيكلية - يبدأ أساس التصنيع الموثوق به به بهندسة نظيفة ومساند محددة جيدًا وميزات ملائمة للتصنيع الآلي تقلل من مخاطر إعادة التثبيت.
نحن ندعم التفاوتات المسموح بها حسب الوظيفة (حتى ± 0.01 مم عند الحاجة) ونقدم خيارات فحص كاملة بما في ذلك تقارير CMM ومقاييس اللولب والتحقق من تشطيب السطح لضمان إمكانية التكرار من النموذج الأولي إلى الإنتاج.
اتصل بخبيرنا الآنGhost #3: متلازمة القذيفة الثقيلة (القصور الذاتي هو عدو حركة الإنسان الآلي)
في البشر، تتضاعف الجرامات. فالكتلة الإضافية في المعصم تتطلب عزم دوران أكبر في الكوع، مما يتطلب عزم دوران أكبر في الكتف، مما يزيد من القوة والحمل الحراري في الذراع بأكمله.
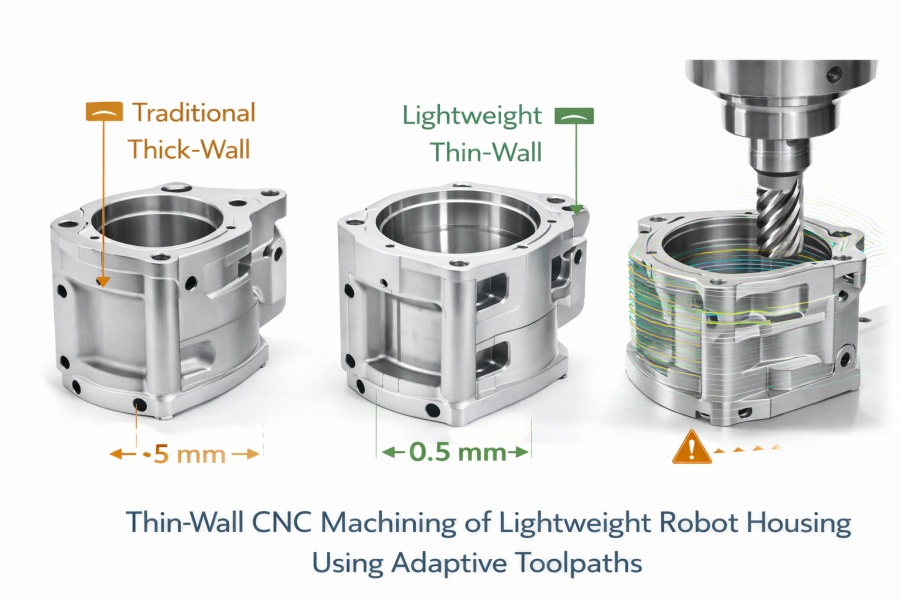
يدفع العديد من الموردين إلى استخدام سماكة جدار متحفظة لأن الجدران الرقيقة تتعرض للاهتزاز والتشوه ويصعب تثبيتها. وهذا يحمي عملياتهم، وليس الروبوت الخاص بك.
ما الذي يحدث خطأ
- يتم “تقوية” الجدران من أجل قابلية التصنيع
- ارتفاع القصور الذاتي
- تباطؤ الاستجابة، ارتفاع الطاقة، تفاقم الانحراف الحراري
- الروبوت “يبدو” أقل قابلية للتحكم حتى مع وجود كود تحكم جيد
كيف نقوم بتصنيع الأجزاء ذات الجدران الرقيقة بشكل موثوق
تصنيع عالي السرعة + تثبيت قطع العمل بما يتناسب مع الشكل الهندسي
نحن نستخدم خيارات معالجة تجعل الجدران الرقيقة ممكنة، بما في ذلك:
- فكوك ناعمة مخصصة / تجهيزات مخصصة
- مسارات أدوات قابلة للتكيف لتقليل ارتفاعات قوة القطع
- التسلسل المراعي للإجهاد (إزالة المواد بطريقة تتجنب الالتواء)
ما هو الجدار الرقيق الواقعي؟
نقوم بانتظام بإنتاج هياكل خفيفة الوزن ومكونات هيكلية للروبوتات تتطلب أقسامًا رفيعة. في بعض التصميمات والسبائك، يمكن الحصول على جدران رفيعة تصل إلى ~0.5 مم, ، ولكن القدرة النهائية تعتمد على الهندسة واستراتيجية الأضلاع وحالات الحمل الوظيفي.
نصيحة عملية: في الروبوتات البشرية، غالبًا ما يصبح “الوزن الناتج عن قابلية التشغيل الآلي” عبئًا خفيًا على الاستقرار والتحكم.
ما الذي يجب إرساله للحصول على مراجعة DFM سريعة ومفيدة (حتى لا نضطر إلى التخمين)
لمساعدتنا في تحديد واجهات الاتصال المعرضة لمخاطر التذبذب بسرعة، أرسل:
- STEP/Parasolid للجزء (ومكدس التزاوج إن وجد)
- الرسم باستخدام GD&T (أو المقصود: ما يجب أن يكون محوريًا، وما يجب أن يكون مسطحًا)
- معلومات عن طراز المحمل/المحرك (نوع المقعد، الغرض من التحميل المسبق، طريقة التجميع)
- نطاق درجة الحرارة المستهدفة (حتى التقدير التقريبي مفيد)
- الأسطح الحرجة: حيث تقيس الانحراف والارتداد وتذبذب عزم الدوران
التفتيش والنتائج التي يمكننا تقديمها (طلبات الروبوتات النموذجية)

اعتمادًا على المرحلة التي تمر بها (النموذج الأولي مقابل النموذج التجريبي)، تطلب الفرق عادةً ما يلي:
- تقرير CMM لعلاقات البيانات والمسامير/الوجوه الرئيسية
- أولويات فحص المادة الأولى المتوافقة مع الواجهات المشتركة
- وثائق تشطيب الأسطح للأسطح الحساسة للاحتكاك
- ملاحظات العملية للتكرار في دفعات صغيرة
توقف عن تصحيح الأخطاء الفيزيائية باستخدام الكود
لا يمكنك التخلص من مشكلة عدم محاذاة مقعد المحمل باستخدام PID. لا يمكنك تصفية الانحراف الناتج عن عدم استقرار المقاس مع تغير درجة الحرارة. تبدأ الحركة البشرية الرائعة بهندسة تحترم علم الحركة والفيزياء.
في شركة دونغقوان هواده للتصنيع الدقيق المحدودة., ، نحن ندعم فرق الروبوتات بأكثر من مجرد التصنيع حسب الطلب. نحن نركز على الواجهات التي تحدد ما إذا كان مفصلك سلسًا وهادئًا وقابلًا للتكرار — بحيث يظل ضبط البرامج الخاص بك ذا مغزى.
هل تريد مراجعة تقنية لـ DFM؟
أرسل ملفات STEP ومتطلباتك الأساسية. سيقوم مهندسونا بمراجعة واجهاتك الحيوية المشتركة ومشاركة ملاحظات عملية حول التصنيع/الفحص.
الأسئلة الشائعة
السؤال الشائع 1: ما هي المشكلات الميكانيكية الأكثر شيوعًا التي تسبب اهتزاز المفاصل في الروبوتات البشرية؟
أكثرها شيوعًا هي عدم محاذاة البيانات في مقاعد المحامل، وأخطاء العلاقة بين التجويف والوجه، والارتداد الدقيق الناتج عن التركيبات غير المستقرة، وعدم خطية الاحتكاك الناتجة عن التراكم الهندسي.
السؤال 2: التراكز مقابل الانحراف — ما الذي يجب أن أحدده بالنسبة لتجاويف المحامل؟
إذا كانت أولويتك هي السلوك الدوراني في الواجهة المجمعة، فإن عناصر التحكم المتعلقة بالانحراف غالبًا ما تكون مرتبطة بشكل مباشر بالأداء. بالنسبة للمكدسات المعقدة، استخدم استراتيجية مرجعية تعكس طريقة التجميع والقياس الفعلية.
السؤال 3: لماذا يظهر الاهتزاز فقط بعد تسخين الروبوت؟
يمكن أن تؤدي التغيرات في درجة الحرارة إلى تغيير ملاءمة التداخل، والحمل المسبق، وسلوك الاحتكاك. حتى الانحراف الحراري الصغير يمكن أن يؤدي إلى حدوث حركة دقيقة أو تغيير تموج عزم الدوران، والذي يقوم جهاز التحكم بتضخيمه في ظل الكسب العالي.
السؤال 4: كيف يمكن أن تقلل المعالجة باستخدام الحاسب الآلي من التذبذب المتعلق بالمحرك التوافقي أو علبة التروس؟
يمكن أن تقلل المعالجة الدقيقة من التذبذب عن طريق تثبيت المحاذاة بين مقاعد المحامل وحوامل علبة التروس وواجهات الإخراج، مما يقلل من الاحتكاك اللامركزي والالتصاق وتذبذب عزم الدوران الذي يحفز حلقة التحكم.
السؤال الشائع 5: هل يمكن بالفعل تصنيع التصميمات ذات الجدران الرقيقة دون حدوث أي تشوه؟
نعم، مع تثبيت العمل المناسب ومسارات الأدوات والتسلسل المراعي للضغط. تعتمد جدوى الجدران الرقيقة على الهندسة والسبائك واستراتيجية الأضلاع والصلابة الوظيفية المطلوبة.
السؤال 6: ما الذي يجب أن أرسله للحصول على مراجعة DFM مفيدة لأجزاء الروبوت البشري؟
أرسل STEP + الرسم (أو نية التزاوج)، وتفاصيل المحمل/المحرك، وطريقة التجميع، ونطاق درجة حرارة التشغيل، وسلط الضوء على البيانات والأسطح الحرجة للمفصل من أجل التحكم في الانحراف/الارتداد.