Seien wir ehrlich: Wenn ein humanoider Roboter in einer statischen Pose zittert, geben die meisten Teams zuerst der Software die Schuld.
Aber in CNC-Bearbeitung für humanoide Roboter, Selbst kleinste Mess- und Passungsfehler können zu Reibungswelligkeit und Mikrospiel führen, die kein Regler vollständig ausgleichen kann.
Sie haben die Drehmomentschleife abgestimmt, die PID-Verstärkungen verfeinert und Ihre Bewegung in der Simulation validiert. Dann nimmt Ihr humanoider Roboter eine statische Pose ein – und der Arm beginnt zu zittern. Der erste Gedanke gilt immer der Software: Encoderrauschen, Antriebsspiel, Controller-Bandbreite, Filterung.
In realen humanoiden Systemen ist Gelenkflattern jedoch häufig das Ergebnis des Regelkreises, der Hardwarefehler bekämpft, die “auf dem Papier geringfügig”, in der Kinematik jedoch massiv sind.

CNC-Fertigungsexperte mit mehr als 15 Jahren Erfahrung. William hilft Ingenieurteams bei der Umwandlung von Prototypen in stabile Produktionsteile durch DFM-Optimierung, Toleranzplanung, Auswahl von Bearbeitungsstrategien und prüfungsgesteuerte Qualitätskontrolle.
william@hdproto.comFür jedes CNC-gefertigte Teil - ob Wellen, Gehäuse, Halterungen, Verteiler oder Strukturkomponenten - beginnt die Grundlage einer zuverlässigen Fertigung mit einer sauberen Geometrie, gut definierten Bezugspunkten und bearbeitungsfreundlichen Merkmalen, die das Risiko des Umspannens minimieren.
Wir unterstützen funktionsbedingte Toleranzen (bei Bedarf bis zu ±0,01 mm) und bieten umfassende Prüfoptionen, einschließlich CMM-Berichten, Gewindelehren und Oberflächenprüfungen, um die Wiederholbarkeit vom Prototyp bis zur Produktion zu gewährleisten.
JETZT UNSEREN EXPERTEN KONTAKTIERENBei Dongguan Huade Precision Manufacturing Co., Ltd., Wir unterstützen Robotik-Teams mit CNC-Bearbeitung für Teile humanoider Roboter – insbesondere Aktuatorgehäuse, Lagersitze, Ausgangsverbindungen und Präzisionsschnittstellen, die darüber entscheiden, ob sich ein Gelenk “lebendig” oder “nervös” anfühlt.”
Technische Zusammenfassung (für Ingenieure und Suchmaschinen)
Dieser Artikel befasst sich mit den mechanischen Ursachen für Gelenkflattern bei humanoiden Robotern und wie präzise CNC-Bearbeitung dieses Flattern reduziert, darunter: GD&T-Bezugspunktstrategie, Konzentrizität/Rundlauf der Lagerbohrung, 5-Achsen-Bearbeitung mit einmaliger Einrichtung, CMM-Prüfung, Auswirkungen der Wärmeausdehnung auf Presspassungen und Hochgeschwindigkeitsbearbeitung dünnwandiger Teile zur Gewichtsreduktion.
Das eigentliche Problem: “Hardware-Geister”, die auf Zeichnungen gut aussehen
Ein typischer Gelenkstapel ist kein einzelnes Merkmal, sondern eine Kette:
Lagersitz → Schnittstelle zwischen Antriebswelle und Stellantrieb → Harmonic Drive/Getriebehalterung → Abtriebswelle
Wenn eine Schnittstelle leicht aus der Achse oder nicht ganz flach ist, kann die Verbindung zwar noch “zusammengebaut” werden, läuft aber nicht reibungslos. Der Controller gleicht dies dann in Echtzeit aus, und was Sie als Jitter wahrnehmen, ist oft mechanisches Blockieren, Mikrospiel oder temperaturbedingte Passungsabweichungen.
Im Folgenden werden drei “Hardware-Geister” vorgestellt, die wir immer wieder in Projekten zur Bearbeitung humanoider Roboter sehen – und wie wir sie beseitigen.
Ghost #1: Stapelfehler (Wo GD&T auf Kinematik trifft)
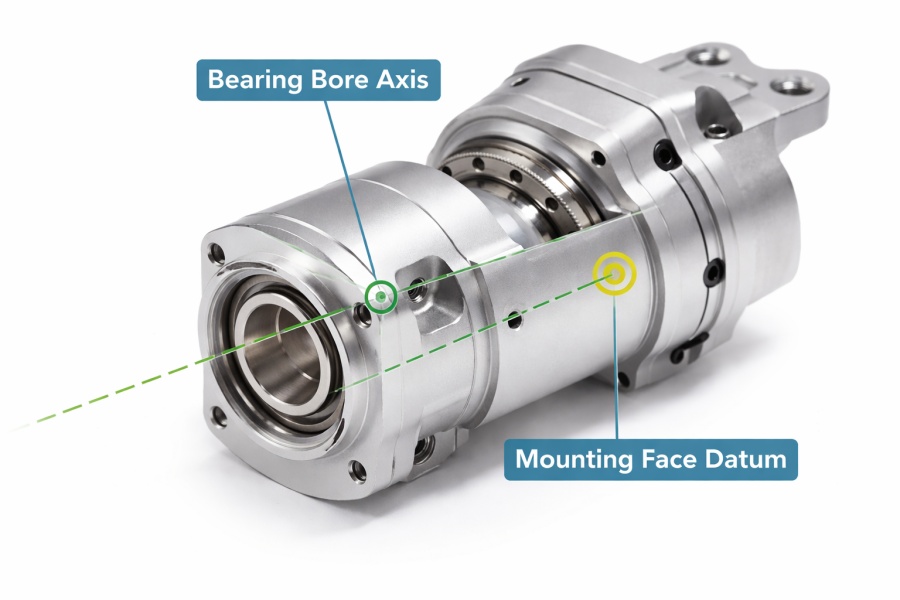
Die meisten Werkstätten behandeln ein Loch als isoliertes Merkmal: “Ø20 H7, Stift passt, fertig.” In einem humanoiden Glied mit hoher Bewegungsfreiheit ist dieselbe Bohrung jedoch ein datenkritisches Element in einer präzisen kinematischen Kette.
Was läuft schief?
Selbst eine geringe Fehlausrichtung zwischen einer Lagerbohrungsachse und einer Montagefläche kann Folgendes verursachen:
- Exzentrische Reibung während der Drehung
- periodische Drehmomentwelligkeit
- Nichtlineare Haftreibung (Stick-Slip), die Regelungsoszillationen auslöst
Es kann vorkommen, dass sich das Gelenk in einem Bereich “gut” verhält, in einem anderen jedoch zittert, da es sich um einen geometrischen und keinen algorithmischen Fehler handelt.
Häufige Symptome, die Ingenieure bemerken
- Stromspitzen die nicht mit der Simulation übereinstimmen (zusätzliches Drehmoment erforderlich, um das Blockieren zu überwinden)
- Niederfrequente Schwingung unter Last (Regelkreis bekämpft mechanische Reibungsschwankungen)
- Kurze Lagerlebensdauer (abnormale Belastung durch Fehlausrichtung)
Wie wir es bei Huade bearbeiten
Wir bearbeiten keine “Löcher”. Wir bearbeiten Datensysteme.
Einmalige Einrichtung für kritische Bezugspunkte
Bei Teilen wie Aktuatorgehäusen bevorzugen wir die Bearbeitung der Lagerbohrungen, Montageflächen, Dichtungsnuten und Ausrichtungsmerkmale in einem Einzelne 5-Achsen-Einrichtung Wann immer möglich. Weniger Umklemmen bedeutet weniger kumulierte Fehler.
CMM-Verifizierung in Verbindung mit Ihrer GD&T
Wir prüfen die Geometrie anhand der Zeichnungsvorgaben – insbesondere die für Robotergelenke wichtigen Beziehungen (Achse zu Fläche, Fläche zu Fläche, Bohrung zu Bohrung). Wenn Ihre Zeichnung auf ASME Y14.5 GD&T verweist, richten wir unsere Prüfstrategie an diesen Vorgaben aus.
Praktischer Tipp: Wenn ein Gelenk bei einer stabilen Haltung zittert, überprüfen Sie Ausrichtung der Bohrungsachse, Rechtwinkligkeit/Ebenheit der Montageflächen und Rundlauf/Konzentrizität vor dem Umschreiben von Code.
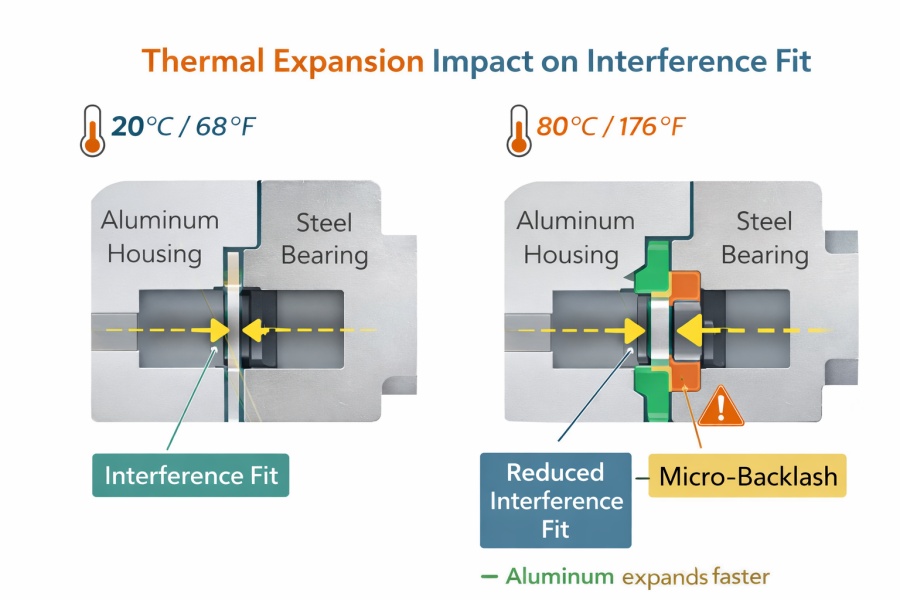
Ghost #2: Thermische Ausdehnungsdrift (Interferenzpassungen, die nicht stabil bleiben)
Humanoide Gelenke sind thermisch dicht. Motoren und Antriebe erzeugen schnell Wärme, und versiegelte Gehäuse können bei kontinuierlicher Bewegung einen Temperaturanstieg erfahren.
Was läuft schief?
Eine Presspassung, die sich bei Raumtemperatur perfekt anfühlt, kann sich ändern, sobald sich die Verbindung erwärmt. Aluminium und Stahl dehnen sich unterschiedlich stark aus, was zu einem Mikrospiel führen oder die Vorspannung so stark verändern kann, dass sich das Reibungsverhalten ändert.
Wie es im Test aussieht
- Der Roboter fühlt sich “stabil” an, wenn er kalt ist.
- Jitter tritt nach dem Aufwärmen oder während wiederholter Zyklen auf.
- Die Leistung variiert zwischen den Sitzungen, selbst bei identischen Steuerungseinstellungen.
Wie wir das Risiko einer thermischen Passung reduzieren
DFM-Überprüfung, die physikalische Fragen stellt
Anstatt blind einer PDF-Toleranz zu folgen, fragen wir:
- Was ist der geschätzte Temperaturbereich der Verbindung?
- Befindet sich der Lagersitz in einem wärmegesättigten Hohlraum oder in der Nähe eines Motorstators?
- Soll die Passung eine Vorspannung aufrechterhalten, ein Kriechen verhindern oder Mikrobewegungen kontrollieren?
Strategieoptionen anpassen (abhängig von Ihrer Architektur)
Je nach Ihrer Montage- und Servicestrategie können wir Sie unterstützen:
- Strengere Kontrolle der Bohrungsgröße und Rundheit zur Stabilisierung des Einpressverhaltens
- Oberflächenbearbeitungsstrategien zur Reduzierung von Mikroschlupf
- Designanpassungen (wo erforderlich), um die Passform über den gesamten Temperaturbereich stabil zu halten
Passive thermische Unterstützung ohne Gewichtsnachteil
Bei einigen Aktuatorgehäusen entscheiden sich die Teams dafür, integrierte externe Mikrofinnen Vergrößerung der Oberfläche für passive Kühlung – keine zusätzlichen Halterungen, kein zusätzliches Gewicht – einfach eine intelligentere Geometrie.
Praktischer Tipp: Wenn Jitter “nach dem Aufwärmen” auftritt, behandeln Sie ihn zunächst als thermomechanisches Problem und nicht als Problem des Reglers.
CNC-Fertigungsexperte mit mehr als 15 Jahren Erfahrung. William hilft Ingenieurteams bei der Umwandlung von Prototypen in stabile Produktionsteile durch DFM-Optimierung, Toleranzplanung, Auswahl von Bearbeitungsstrategien und prüfungsgesteuerte Qualitätskontrolle.
william@hdproto.comFür jedes CNC-gefertigte Teil - ob Wellen, Gehäuse, Halterungen, Verteiler oder Strukturkomponenten - beginnt die Grundlage einer zuverlässigen Fertigung mit einer sauberen Geometrie, gut definierten Bezugspunkten und bearbeitungsfreundlichen Merkmalen, die das Risiko des Umspannens minimieren.
Wir unterstützen funktionsbedingte Toleranzen (bei Bedarf bis zu ±0,01 mm) und bieten umfassende Prüfoptionen, einschließlich CMM-Berichten, Gewindelehren und Oberflächenprüfungen, um die Wiederholbarkeit vom Prototyp bis zur Produktion zu gewährleisten.
JETZT UNSEREN EXPERTEN KONTAKTIERENGhost #3: Schweres-Gehäuse-Syndrom (Trägheit ist der Feind humanoider Bewegung)
Bei Humanoiden vervielfachen sich die Gramm. Zusätzliche Masse am Handgelenk erfordert mehr Drehmoment am Ellbogen, was wiederum mehr Drehmoment an der Schulter erfordert, wodurch die Kraft und die thermische Belastung im gesamten Arm erhöht werden.
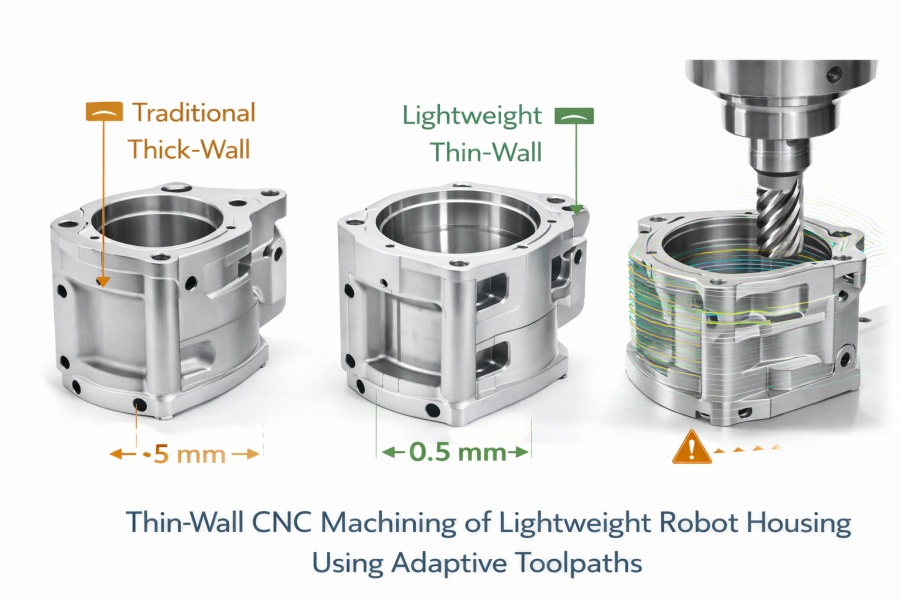
Viele Lieferanten drängen auf konservative Wandstärken, da dünne Wände vibrieren, sich verziehen und schwer zu befestigen sind. Das schützt ihren Prozess, nicht Ihren Roboter.
Was läuft schief?
- Wände werden für die Herstellbarkeit “verstärkt”
- Trägheit steigt
- Die Reaktion verlangsamt sich, die Leistung steigt, die thermische Drift verschlechtert sich.
- Der Roboter “fühlt” sich selbst mit einem guten Steuerungscode weniger kontrollierbar an.
Wie wir dünnwandige Teile zuverlässig bearbeiten
Hochgeschwindigkeitsbearbeitung + Werkstückspannung, die zur Geometrie passt
Wir verwenden Verfahren, die dünne Wände ermöglichen, darunter:
- Maßgefertigte weiche Backen / spezielle Vorrichtungen
- Adaptive Werkzeugwege zur Reduzierung von Schnittkraftspitzen
- stressbewusste Sequenzierung (Material so entfernen, dass Verformungen vermieden werden)
Welche dünne Wand ist realistisch?
Wir fertigen regelmäßig leichte Gehäuse und strukturelle Roboterkomponenten, bei denen dünne Wandstärken erforderlich sind. Bei einigen Konstruktionen und Legierungen können Wandstärken von bis zu ~0,5 mm, Die endgültige Leistungsfähigkeit hängt jedoch von der Geometrie, der Rippenstruktur und den funktionalen Lastfällen ab.
Praktischer Tipp: Bei Humanoiden wird das “durch die Bearbeitbarkeit bedingte Gewicht” oft zu einer versteckten Belastung für Stabilität und Kontrolle.
Was Sie für eine schnelle, nützliche DFM-Prüfung einsenden sollten (damit wir nicht raten müssen)
Um uns dabei zu helfen, Schnittstellen mit Jitter-Risiko schnell zu identifizieren, senden Sie bitte Folgendes:
- STEP/Parasolid des Teils (und gegebenenfalls des Gegenstapels)
- Zeichnen mit GD&T (oder die Absicht: Was muss koaxial sein, was muss flach sein)
- Lager-/Antriebsmodellinformationen (Sitztyp, Vorspannungsabsicht, Montageverfahren)
- Ziel-Temperaturbereich (auch eine grobe Schätzung ist hilfreich)
- Kritische Oberflächen: Hier messen Sie Rundlauf, Spiel und Drehmomentwelligkeit.
Inspektion und Ergebnisse, die wir liefern können (typische Anfragen im Bereich Robotik)

Je nach Phase (Prototyp vs. Pilotprojekt) fordern Teams in der Regel Folgendes:
- CMM-Bericht für Bezugsbeziehungen und Schlüsselbohrungen/Flächen
- Prioritäten bei der Erstmusterprüfung abgestimmt auf gemeinsame Schnittstellen
- Oberflächenbeschaffenheitsdokumentation für reibungskritische Oberflächen
- Prozessnotizen für die Wiederholbarkeit in kleinen Chargen
Hören Sie auf, Physik mit Code zu debuggen
Sie können sich nicht aus einem falsch ausgerichteten Lagersitz herausmanövrieren. Sie können Drift, die durch instabile Passungen bei unterschiedlichen Temperaturen verursacht wird, nicht wegfiltern. Großartige humanoide Bewegungen beginnen mit einer Geometrie, die die Kinematik und Physik berücksichtigt.
Bei Dongguan Huade Precision Manufacturing Co., Ltd., Wir unterstützen Robotik-Teams über das reine Make-to-Print hinaus. Wir konzentrieren uns auf die Schnittstellen, die darüber entscheiden, ob Ihre Verbindung reibungslos, leise und wiederholbar ist – damit Ihre Software-Optimierung sinnvoll bleibt.
Möchten Sie eine technische DFM-Prüfung?
Senden Sie uns Ihre STEP-Dateien und wichtigsten Anforderungen. Unsere Ingenieure prüfen Ihre kritischen Schnittstellen und geben Ihnen praktisches Feedback zur Bearbeitung/Prüfung.
Häufig gestellte Fragen
FAQ 1: Welche mechanischen Probleme verursachen am häufigsten Gelenkflattern bei humanoiden Robotern?
Die häufigsten Ursachen sind Fehlausrichtungen der Bezugspunkte in Lagersitzen, Fehler im Verhältnis zwischen Bohrung und Fläche, Mikrospiel aufgrund instabiler Passungen und Reibungsnichtlinearität aufgrund geometrischer Stapelung.
FAQ 2: Konzentrizität vs. Rundlauf – was sollte ich für Lagerbohrungen angeben?
Wenn Ihr Schwerpunkt auf dem Rotationsverhalten an der montierten Schnittstelle liegt, sind Rundlaufkontrollen oft direkter mit der Leistung verbunden. Verwenden Sie für komplexe Stapel eine Bezugsstrategie, die die tatsächliche Montage und Messmethode widerspiegelt.
FAQ 3: Warum tritt Jitter erst nach dem Aufwärmen des Roboters auf?
Temperaturänderungen können Presspassungen, Vorspannung und Reibungsverhalten verändern. Selbst geringe thermische Drift kann zu Mikrobewegungen führen oder die Drehmomentwelligkeit verändern, die der Regler bei hoher Verstärkung verstärkt.
FAQ 4: Wie kann die CNC-Bearbeitung harmonische Antriebs- oder Getriebeoszillationen reduzieren?
Präzisionsbearbeitung kann Schwingungen reduzieren, indem sie die Ausrichtung zwischen Lagersitzen, Getriebehalterungen und Ausgangsschnittstellen stabilisiert und so exzentrische Reibung, Blockaden und Drehmomentwelligkeit verringert, die den Regelkreis anregen.
FAQ 5: Können dünnwandige Konstruktionen wirklich ohne Verformungen bearbeitet werden?
Ja, mit der richtigen Werkstückspannung, den richtigen Werkzeugwegen und einer spannungsbewussten Reihenfolge. Die Machbarkeit dünner Wände hängt von der Geometrie, der Legierung, der Rippenstrategie und der erforderlichen Funktionssteifigkeit ab.
FAQ 6: Was muss ich einsenden, um eine nützliche DFM-Prüfung für Teile eines humanoiden Roboters zu erhalten?
Senden Sie STEP + Zeichnung (oder Passungsabsicht), Angaben zu Lager/Antrieb, Montageverfahren, Betriebstemperaturbereich und heben Sie Ihre für die Verbindung kritischen Bezugspunkte und Oberflächen für die Rundlauf-/Spielkontrolle hervor.