Seamos sinceros: cuando un robot humanoide tiembla en una postura estática, la mayoría de los equipos culpan primero al software.
Pero en Mecanizado CNC para robots humanoides, los pequeños errores de datos y ajuste pueden crear ondulaciones por fricción y microholguras que ningún controlador puede ocultar por completo.
Ha ajustado el bucle de par, perfeccionado las ganancias PID y validado su movimiento en la simulación. Entonces, su robot humanoide mantiene una postura estática y el brazo comienza a temblar. El primer instinto siempre es el software: ruido del codificador, holgura del accionamiento, ancho de banda del controlador, filtrado.
Pero en los sistemas humanoides reales, la fluctuación de las articulaciones suele ser el bucle de control que lucha contra los errores de hardware que son “pequeños sobre el papel” y enormes en cinemática.

Experto en fabricación CNC con más de 15 años de experiencia. William ayuda a los equipos de ingeniería a convertir prototipos en piezas de producción estables mediante la optimización de DFM, la planificación de tolerancias, la selección de estrategias de mecanizado y el control de calidad basado en inspecciones.
william@hdproto.comPara cualquier pieza mecanizada por CNC, ya sean ejes, carcasas, soportes, colectores o componentes estructurales, la base de una fabricación fiable comienza con una geometría limpia, unos puntos de referencia bien definidos y unas características que faciliten el mecanizado y minimicen los riesgos de reapriete.
Admitimos tolerancias en función de la función (hasta ±0,01 mm cuando sea necesario) y ofrecemos opciones de inspección completas, incluidos informes de MMC, calibres de roscas y verificación del acabado superficial para garantizar la repetibilidad desde el prototipo hasta la producción.
CONTACTA CON NUESTRO EXPERTO AHORA MISMOEn Dongguan Huade Precision Manufacturing Co., Ltd., Apoyamos a los equipos de robótica con el mecanizado CNC de piezas para robots humanoides, especialmente carcasas de actuadores, asientos de cojinetes, enlaces de salida e interfaces de precisión que determinan si una articulación se siente “viva” o “nerviosa”.”
Resumen técnico rápido (para ingenieros y motores de búsqueda)
Este artículo se centra en las causas mecánicas fundamentales de la vibración en las articulaciones de los robots humanoides y en cómo el mecanizado CNC de precisión las reduce, incluyendo: Estrategia de referencia GD&T, concentricidad/desviación del agujero del cojinete, mecanizado de 5 ejes con una sola configuración, inspección CMM, efectos de la expansión térmica en los ajustes por interferencia y mecanizado de alta velocidad de paredes delgadas. para la reducción de peso.
El verdadero problema: “fantasmas de hardware” que parecen estar bien en los planos
Una pila de juntas típica no es una sola característica, sino una cadena:
Asiento del cojinete → Interfaz del eje del actuador → Transmisión armónica / soporte de la caja de cambios → Enlace de salida
Cuando una interfaz está ligeramente descentrada o descentrada, la unión aún puede “ensamblarse”, pero no funcionará correctamente. El controlador compensa entonces en tiempo real, y lo que se observa como fluctuación suele ser una unión mecánica, un microcontraataque o una deriva de ajuste provocada por la temperatura.
A continuación se muestran tres “fantasmas del hardware” que vemos repetidamente en los proyectos de mecanizado de robots humanoides, y cómo los eliminamos.
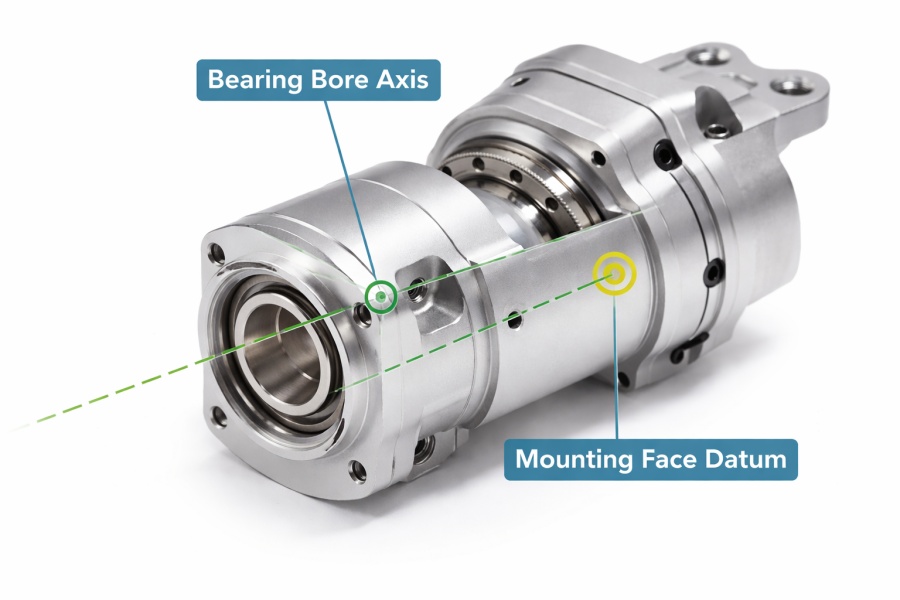
Ghost #1: Errores de apilamiento (donde GD&T se une a la cinemática)
La mayoría de los talleres tratan un orificio como una característica aislada: “Ø20 H7, el pasador encaja, listo”. En una extremidad humanoide de alto grado de libertad, ese mismo orificio es un elemento crítico de referencia en una cadena cinemática de precisión.
¿Qué sale mal?
Incluso una pequeña desviación entre el eje del cojinete y la superficie de montaje puede provocar:
- Fricción excéntrica durante la rotación
- ondulación periódica del par
- adherencia no lineal (stick-slip) que provoca oscilaciones de control
Es posible que vea que la unión se comporta “bien” en una región y que tiembla en otra porque el error es geométrico, no algorítmico.
Síntomas comunes que observan los ingenieros
- Picos de corriente que no coinciden con la simulación (se necesita un par adicional para superar el agarrotamiento)
- Oscilación de baja frecuencia bajo carga (bucle de control que combate la variación de la fricción mecánica)
- Corta vida útil de los rodamientos (carga anómala debido a una desalineación)
Cómo lo fabricamos en Huade
No mecanizamos “agujeros”. Mecanizamos sistemas de datos.
Mecanizado con una sola configuración para datos críticos
Para piezas como las carcasas de los actuadores, preferimos mecanizar los orificios de los cojinetes, las caras de montaje, las ranuras de sellado y las características de alineación en un Configuración única de 5 ejes Siempre que sea posible. Menos reconexiones significan menos errores compuestos.
Verificación CMM vinculada a su GD&T
Inspeccionamos la geometría comparándola con la intención del dibujo, especialmente las relaciones que son importantes en las juntas de los robots (eje a cara, cara a cara, agujero a agujero). Si su dibujo hace referencia a ASME Y14.5 GD&T, alineamos la estrategia de inspección con esa intención.
Conclusión práctica: Si una articulación tiembla en una postura estable, comprueba alineación del eje del orificio, perpendicularidad/planitud de las caras de montaje y excentricidad/concentricidad. antes de reescribir el código.
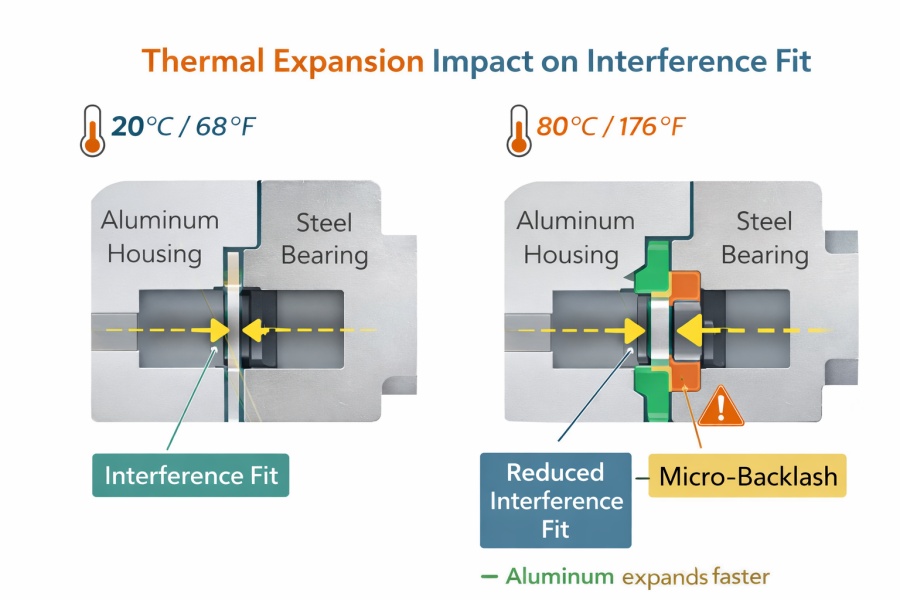
Ghost #2: Deriva por expansión térmica (ajustes por interferencia que no permanecen como interferencia)
Las articulaciones humanoides son térmicamente densas. Los motores y los accionamientos generan calor rápidamente, y las carcasas selladas pueden alcanzar altas temperaturas durante el movimiento continuo.
¿Qué sale mal?
Un ajuste a presión que parece perfecto a temperatura ambiente puede cambiar una vez que la unión se calienta. El aluminio y el acero se expanden a ritmos diferentes, lo que puede convertir un ajuste perfecto en un microholgura, o cambiar la precarga lo suficiente como para modificar el comportamiento de la fricción.
Cómo se ve en las pruebas
- El robot se siente “estable” cuando hace frío.
- La fluctuación aparece después del calentamiento o durante ciclos repetidos.
- El rendimiento varía entre sesiones, incluso con ajustes de control idénticos.
Cómo reducimos el riesgo de ajuste térmico
Revisión DFM que plantea preguntas sobre física.
En lugar de seguir ciegamente una tolerancia PDF, preguntamos:
- ¿Cuál es el rango de temperatura estimado de la junta?
- ¿El asiento del cojinete se encuentra en una cavidad calentada o cerca del estator del motor?
- ¿El ajuste está diseñado para mantener la precarga, evitar el deslizamiento o controlar los micromovimientos?
Opciones de estrategia adecuadas (dependiendo de su arquitectura)
En función de su estrategia de montaje y servicio, podemos ofrecerle asistencia en:
- Control más estricto del tamaño y la redondez del orificio para estabilizar el comportamiento del ajuste a presión.
- Estrategias de acabado superficial para reducir el microdeslizamiento.
- Ajustes de diseño (cuando sea necesario) para garantizar un ajuste estable a diferentes temperaturas.
Ayuda térmica pasiva sin penalización de peso
En algunas carcasas de actuadores, los equipos optan por añadir Características microfinas externas integradas Aumentar la superficie para la refrigeración pasiva: sin soportes adicionales, sin peso adicional en el montaje, solo una geometría más inteligente.
Conclusión práctica: Si la fluctuación aparece “después del calentamiento”, trátela primero como un problema termomecánico, no como un problema del controlador.
Experto en fabricación CNC con más de 15 años de experiencia. William ayuda a los equipos de ingeniería a convertir prototipos en piezas de producción estables mediante la optimización de DFM, la planificación de tolerancias, la selección de estrategias de mecanizado y el control de calidad basado en inspecciones.
william@hdproto.comPara cualquier pieza mecanizada por CNC, ya sean ejes, carcasas, soportes, colectores o componentes estructurales, la base de una fabricación fiable comienza con una geometría limpia, unos puntos de referencia bien definidos y unas características que faciliten el mecanizado y minimicen los riesgos de reapriete.
Admitimos tolerancias en función de la función (hasta ±0,01 mm cuando sea necesario) y ofrecemos opciones de inspección completas, incluidos informes de MMC, calibres de roscas y verificación del acabado superficial para garantizar la repetibilidad desde el prototipo hasta la producción.
CONTACTA CON NUESTRO EXPERTO AHORA MISMOGhost #3: Síndrome del caparazón pesado (la inercia es el enemigo del movimiento humanoide)
En los humanoides, los gramos se multiplican. El exceso de masa en la muñeca exige más torque en el codo, lo que exige más en el hombro, lo que aumenta la potencia y la carga térmica en todo el brazo.
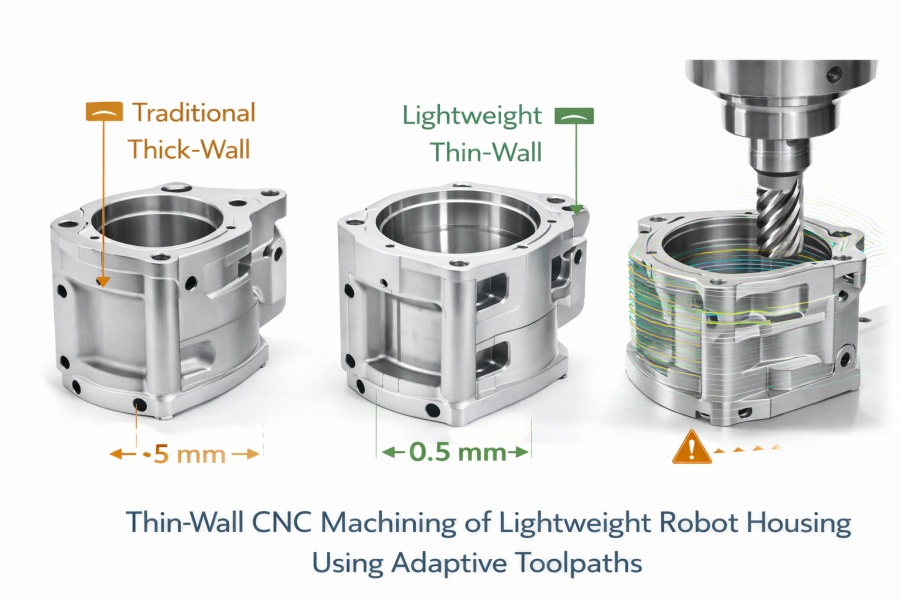
Muchos proveedores recomiendan un espesor de pared conservador porque las paredes delgadas vibran, se deforman y son difíciles de fijar. Eso protege su proceso, no su robot.
¿Qué sale mal?
- Las paredes se “refuerzan” para facilitar la fabricación.
- aumenta la inercia
- La respuesta se ralentiza, la potencia aumenta y la deriva térmica empeora.
- El robot “parece” menos controlable incluso con un buen código de control.
Cómo mecanizamos piezas de pared delgada de forma fiable
Mecanizado de alta velocidad + sujeción de piezas que se adapta a la geometría
Utilizamos opciones de proceso que hacen factible la fabricación de paredes delgadas, entre las que se incluyen:
- mandíbulas blandas personalizadas / accesorios específicos
- Trayectorias de herramienta adaptativas para reducir los picos de fuerza de corte.
- Secuenciación sensible al estrés (eliminar material de forma que se evite la deformación).
¿Qué pared delgada es realista?
Fabricamos regularmente carcasas ligeras y componentes estructurales para robots en los que se requieren secciones delgadas. En algunos diseños y aleaciones, se pueden conseguir paredes delgadas de hasta ~0,5 mm, pero la capacidad final depende de la geometría, la estrategia de nervaduras y los casos de carga funcional.
Conclusión práctica: En los humanoides, el “peso determinado por la maquinabilidad” suele convertirse en un impuesto oculto sobre la estabilidad y el control.
Qué enviar para obtener una revisión DFM rápida y útil (para que no tengamos que hacer conjeturas)
Para ayudarnos a identificar rápidamente las interfaces con riesgo de fluctuación, envíe:
- STEP/Parasolid de la pieza (y pila de acoplamiento, si está disponible)
- Dibujo con GD&T (o la intención: lo que debe ser coaxial, lo que debe ser plano)
- Información sobre el modelo de cojinete/transmisión (tipo de asiento, intención de precarga, método de montaje)
- rango de temperatura objetivo (incluso una estimación aproximada es útil)
- Superficies críticas: donde se miden la excentricidad, el juego y la ondulación del par.
Inspección y resultados que podemos proporcionar (solicitudes típicas de robótica)

Dependiendo de la fase en la que se encuentre (prototipo frente a piloto), los equipos suelen solicitar:
- Informe CMM para relaciones de referencia y orificios/caras clave
- Prioridades de inspección del primer artículo alineadas con las interfaces conjuntas.
- Documentación sobre el acabado superficial de superficies críticas en cuanto a la fricción.
- Notas de proceso para la repetibilidad en lotes pequeños.
Deja de depurar la física con código
No se puede solucionar un asiento de cojinete desalineado con un PID. No se puede filtrar la deriva causada por ajustes inestables a diferentes temperaturas. Un buen movimiento humanoide comienza con una geometría que respeta la cinemática y la física.
En Dongguan Huade Precision Manufacturing Co., Ltd., Apoyamos a los equipos de robótica más allá de la simple fabricación según plano. Nos centramos en las interfaces que determinan si su unión es fluida, silenciosa y repetible, para que el ajuste de su software siga siendo significativo.
¿Quieres una revisión técnica de DFM?
Envíenos sus archivos STEP y los requisitos clave. Nuestros ingenieros revisarán sus interfaces críticas para las juntas y le proporcionarán comentarios prácticos sobre el mecanizado y la inspección.
Preguntas frecuentes
Pregunta frecuente n.º 1: ¿Qué problemas mecánicos suelen causar más a menudo la inestabilidad de las articulaciones en los robots humanoides?
Los más comunes son la desalineación de los datos en los asientos de los cojinetes, los errores en la relación entre el diámetro interior y la superficie, el microholgura debido a ajustes inestables y la no linealidad de la fricción causada por la acumulación geométrica.
Pregunta frecuente n.º 2: Concentricidad frente a excentricidad: ¿qué debo especificar para los agujeros de los rodamientos?
Si su prioridad es el comportamiento rotacional en la interfaz ensamblada, los controles relacionados con la excentricidad suelen estar más directamente relacionados con el rendimiento. Para pilas complejas, utilice una estrategia de referencia que refleje el método real de ensamblaje y medición.
Pregunta frecuente n.º 3: ¿Por qué aparece la fluctuación solo después de que el robot se calienta?
Los cambios de temperatura pueden alterar los ajustes de interferencia, la precarga y el comportamiento de la fricción. Incluso una pequeña deriva térmica puede introducir micromovimientos o cambiar la ondulación del par, que el controlador amplifica con una ganancia alta.
Pregunta frecuente n.º 4: ¿Cómo puede el mecanizado CNC reducir la oscilación relacionada con el accionamiento armónico o la caja de cambios?
El mecanizado de precisión puede reducir la oscilación al estabilizar la alineación entre los asientos de los cojinetes, los soportes de la caja de cambios y las interfaces de salida, lo que reduce la fricción excéntrica, el agarrotamiento y la ondulación del par que excitan el bucle de control.
Pregunta frecuente n.º 5: ¿Es posible mecanizar diseños de paredes delgadas sin que se deformen?
Sí, con la sujeción adecuada, las trayectorias de herramienta y una secuenciación que tenga en cuenta las tensiones. La viabilidad de las paredes delgadas depende de la geometría, la aleación, la estrategia de nervaduras y la rigidez funcional requerida.
Pregunta frecuente 6: ¿Qué debo enviar para obtener una revisión DFM útil para las piezas de un robot humanoide?
Envíe STEP + dibujo (o intención de acoplamiento), detalles del cojinete/accionamiento, método de montaje, rango de temperatura de funcionamiento y destaque los datos y superficies críticos de la unión para el control del descentramiento/holgura.