Sejamos honestos: quando um robô humanóide treme em uma pose estática, a maioria das equipes culpa primeiro o software.
Mas em Usinagem CNC para robôs humanóides, pequenos erros de dados e ajuste podem criar ondulações de atrito e micro-folga que nenhum controlador consegue ocultar totalmente.
Você ajustou o loop de torque, refinou os ganhos PID e validou seu movimento na simulação. Então, seu robô humanóide mantém uma pose estática — e o braço começa a tremer. O primeiro instinto é sempre o software: ruído do codificador, folga do acionamento, largura de banda do controlador, filtragem.
Mas, em sistemas humanóides reais, a instabilidade das articulações é frequentemente o circuito de controle que combate erros de hardware que são “pequenos no papel”, mas enormes na cinemática.

Especialista em fabricação CNC com mais de 15 anos de experiência. William ajuda as equipes de engenharia a transformar protótipos em peças de produção estáveis por meio de otimização de DFM, planejamento de tolerância, seleção de estratégia de usinagem e controle de qualidade orientado por inspeção.
william@hdproto.comPara qualquer peça usinada em CNC - sejam eixos, carcaças, suportes, coletores ou componentes estruturais - a base de uma fabricação confiável começa com uma geometria limpa, pontos de referência bem definidos e recursos de fácil usinagem que minimizam os riscos de nova fixação.
Oferecemos suporte a tolerâncias orientadas por função (até ±0,01 mm quando necessário) e oferecemos opções completas de inspeção, incluindo relatórios de CMM, medidores de rosca e verificação de acabamento de superfície para garantir a repetibilidade do protótipo à produção.
Entre em contato com nosso especialista agora mesmoNo Dongguan Huade Precision Manufacturing Co., Ltd., Apoiamos equipes de robótica com usinagem CNC para peças de robôs humanóides, especialmente carcaças de atuadores, assentos de rolamentos, articulações de saída e interfaces de precisão que determinam se uma articulação parece “viva” ou “nervosa”.”
Resumo técnico rápido (para engenheiros e mecanismos de busca)
Este artigo enfoca as causas mecânicas da instabilidade nas articulações dos robôs humanóides e como a usinagem CNC de precisão as reduz, incluindo: Estratégia de referência GD&T, concentricidade/desvio do furo do rolamento, usinagem de 5 eixos com configuração única, inspeção CMM, efeitos da expansão térmica em ajustes de interferência e usinagem de alta velocidade em paredes finas. para redução de peso.
O verdadeiro problema: “fantasmas de hardware” que parecem bem nos desenhos
Uma pilha de juntas típica não é uma característica isolada, mas sim uma cadeia:
Assento do rolamento → Interface do eixo do atuador → Acoplamento harmônico/suporte da caixa de engrenagens → Ligação de saída
Quando uma interface está ligeiramente fora do eixo ou fora do plano, a junta ainda pode “montar”, mas não funcionará suavemente. O controlador então compensa em tempo real, e o que você observa como oscilação é frequentemente uma ligação mecânica, micro-folga ou desvio de ajuste causado pela temperatura.
Abaixo estão três “fantasmas de hardware” que vemos repetidamente em projetos de usinagem de robôs humanóides — e como os removemos.
Ghost #1: Erros de empilhamento (onde GD&T encontra a cinemática)
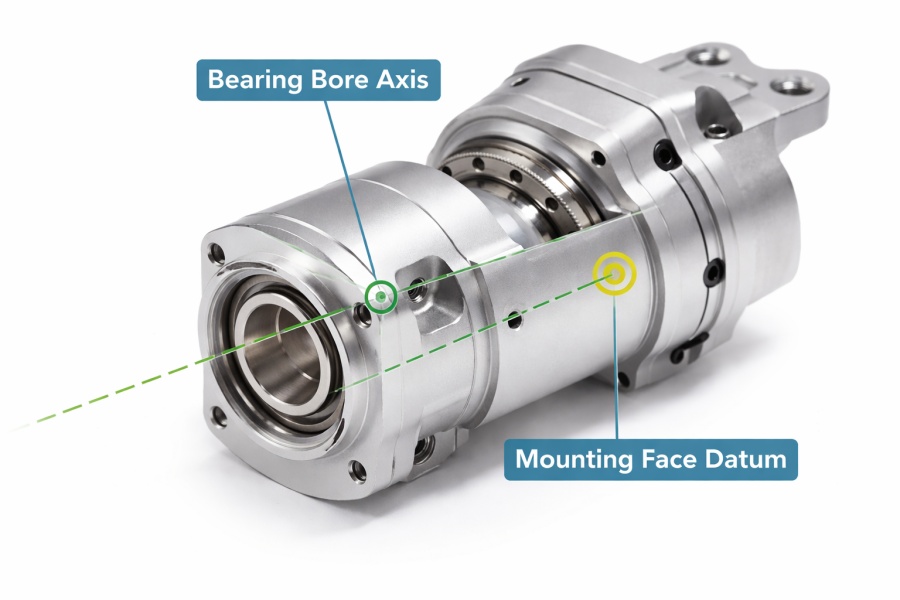
A maioria das oficinas trata um furo como uma característica isolada: “Ø20 H7, o pino encaixa, pronto”. Em um membro humanóide de alto grau de liberdade, esse mesmo furo é um elemento crítico de referência em uma cadeia cinemática de precisão.
O que dá errado
Mesmo uma pequena relação incorreta entre o eixo do furo do rolamento e a face de montagem pode causar:
- atrito excêntrico durante a rotação
- variação periódica do torque
- aderência não linear (stick-slip) que provoca oscilações no controle
Você pode observar que a junta se comporta “bem” em uma região e apresenta instabilidade em outra, pois o erro é geométrico, não algorítmico.
Sintomas comuns observados pelos engenheiros
- Picos de corrente que não correspondem à simulação (torque extra necessário para superar o atrito)
- Oscilação de baixa frequência sob carga (circuito de controle combatendo a variação do atrito mecânico)
- Vida útil curta do rolamento (carga anormal devido ao desalinhamento)
Como fazemos isso na Huade
Não usinamos “furos”. Usinamos sistemas de dados.
Usinagem com configuração única para referências críticas
Para peças como carcaças de atuadores, preferimos usinar os furos dos rolamentos, as faces de montagem, as ranhuras de vedação e os recursos de alinhamento em um configuração única de 5 eixos sempre que possível. Menos recolocações significam menos erros acumulados.
Verificação CMM vinculada ao seu GD&T
Inspecionamos a geometria em relação à intenção do desenho, especialmente as relações que são importantes nas juntas do robô (eixo-face, face-face, furo-furo). Se o seu desenho faz referência à norma ASME Y14.5 GD&T, alinhamos a estratégia de inspeção a essa intenção.
Conclusão prática: Se uma articulação treme em uma postura estável, verifique alinhamento do eixo do furo, perpendicularidade/planicidade das faces de montagem e excentricidade/concentricidade antes de reescrever o código.
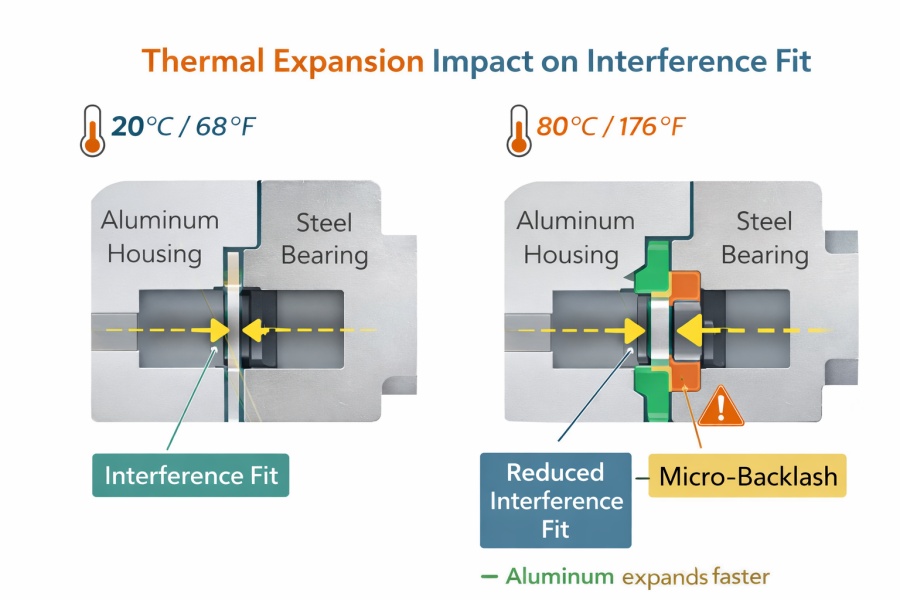
Ghost #2: Desvio de expansão térmica (ajustes de interferência que não permanecem interferentes)
As articulações dos humanóides são termicamente densas. Os motores e acionamentos geram calor rapidamente, e as carcaças seladas podem atingir temperaturas elevadas durante o movimento contínuo.
O que dá errado
Um encaixe por pressão que parece perfeito à temperatura ambiente pode mudar quando a junta aquece. O alumínio e o aço expandem-se a taxas diferentes, o que pode transformar um encaixe apertado em microfolga — ou alterar a pré-carga o suficiente para mudar o comportamento do atrito.
Como fica na prática
- O robô parece “estável” quando está frio.
- O jitter aparece após o aquecimento ou durante ciclos repetidos.
- O desempenho varia entre as sessões, mesmo com configurações de controle idênticas.
Como reduzimos o risco de adaptação térmica
Revisão DFM que faz perguntas sobre física
Em vez de seguir cegamente uma tolerância de PDF, perguntamos:
- Qual é a faixa de temperatura estimada da junta?
- O assento do rolamento está em uma cavidade aquecida ou próximo ao estator do motor?
- O ajuste tem como objetivo manter a pré-carga, impedir o deslizamento ou controlar o micro-movimento?
Opções de estratégia adequadas (dependendo da sua arquitetura)
Dependendo da sua estratégia de montagem e serviço, podemos oferecer suporte:
- controle mais rigoroso do tamanho e da circularidade do furo para estabilizar o comportamento do encaixe por pressão
- estratégias de acabamento de superfície para reduzir o microdeslizamento
- Ajustes no design (quando apropriado) para tornar o ajuste estável em todas as temperaturas
Ajuda térmica passiva sem penalização de peso
Para algumas carcaças de atuadores, as equipes optam por adicionar microfinas externas integradas para aumentar a área de superfície para resfriamento passivo — sem suportes extras, sem peso extra na montagem — apenas uma geometria mais inteligente.
Conclusão prática: Se o jitter aparecer “após o aquecimento”, trate-o primeiro como um problema termomecânico, e não como um problema do controlador.
Especialista em fabricação CNC com mais de 15 anos de experiência. William ajuda as equipes de engenharia a transformar protótipos em peças de produção estáveis por meio de otimização de DFM, planejamento de tolerância, seleção de estratégia de usinagem e controle de qualidade orientado por inspeção.
william@hdproto.comPara qualquer peça usinada em CNC - sejam eixos, carcaças, suportes, coletores ou componentes estruturais - a base de uma fabricação confiável começa com uma geometria limpa, pontos de referência bem definidos e recursos de fácil usinagem que minimizam os riscos de nova fixação.
Oferecemos suporte a tolerâncias orientadas por função (até ±0,01 mm quando necessário) e oferecemos opções completas de inspeção, incluindo relatórios de CMM, medidores de rosca e verificação de acabamento de superfície para garantir a repetibilidade do protótipo à produção.
Entre em contato com nosso especialista agora mesmoGhost #3: Síndrome da Carcaça Pesada (A Inércia é o Inimigo do Movimento Humanóide)
Nos humanóides, os gramas se multiplicam. O peso extra no pulso exige mais torque no cotovelo, o que exige mais no ombro, o que aumenta a potência e a carga térmica em todo o braço.
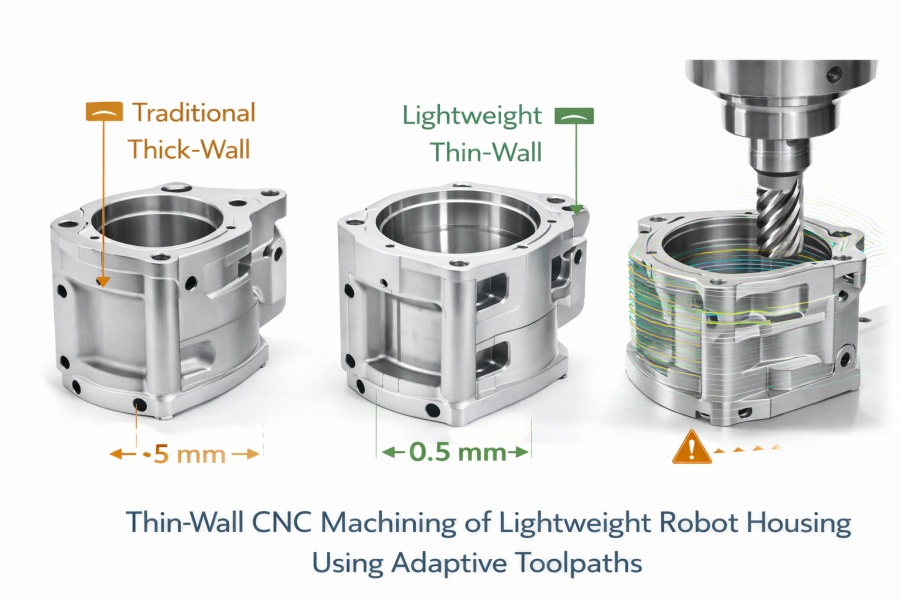
Muitos fornecedores insistem em espessuras de parede conservadoras porque as paredes finas vibram, deformam-se e são difíceis de fixar. Isso protege o processo deles, não o seu robô.
O que dá errado
- As paredes são “reforçadas” para facilitar a fabricação
- a inércia aumenta
- a resposta fica mais lenta, a potência aumenta, o desvio térmico piora
- o robô “parece” menos controlável, mesmo com um bom código de controle
Como usinamos peças de paredes finas com confiabilidade
Usinagem de alta velocidade + fixação de peças que se adapta à geometria
Utilizamos opções de processo que tornam viáveis paredes finas, incluindo:
- mandíbulas macias personalizadas / acessórios dedicados
- trajetórias adaptativas para reduzir picos de força de corte
- sequenciamento sensível ao estresse (remova o material de forma a evitar deformações)
Qual espessura de parede é realista?
Produzimos regularmente carcaças leves e componentes estruturais para robôs onde são necessárias seções finas. Em alguns projetos e ligas, é possível obter paredes finas com espessura de até ~0,5 mm, mas a capacidade final depende da geometria, da estratégia de nervuras e dos casos de carga funcional.
Conclusão prática: Nos humanóides, o “peso determinado pela usinabilidade” muitas vezes se torna um imposto oculto sobre a estabilidade e o controle.
O que enviar para uma revisão rápida e útil do DFM (para que não tenhamos que adivinhar)
Para nos ajudar a identificar rapidamente as interfaces com risco de instabilidade, envie:
- STEP/Parasolid da peça (e pilha de acoplamento, se disponível)
- desenho com GD&T (ou a intenção: o que deve ser coaxial, o que deve ser plano)
- informações sobre o modelo do rolamento/acionamento (tipo de assento, intenção de pré-carga, método de montagem)
- faixa de temperatura alvo (mesmo uma estimativa aproximada ajuda)
- superfícies críticas: onde se mede o desvio, a folga e a ondulação do torque
Inspeção e resultados que podemos fornecer (solicitações típicas de robótica)

Dependendo do estágio em que você se encontra (protótipo ou piloto), as equipes geralmente solicitam:
- Relatório CMM para relações de referência e furos/faces-chave
- prioridades de inspeção do primeiro artigo alinhadas às interfaces conjuntas
- documentação sobre acabamento superficial para superfícies críticas em termos de atrito
- notas do processo para repetibilidade em pequenos lotes
Pare de depurar a física com código
Não é possível resolver um problema de desalinhamento do assento do rolamento com PID. Não é possível filtrar o desvio causado por ajustes instáveis em diferentes temperaturas. Um movimento humanoide perfeito começa com uma geometria que respeita a cinemática e a física.
No Dongguan Huade Precision Manufacturing Co., Ltd., Apoiamos equipes de robótica com muito mais do que apenas a fabricação sob encomenda. Nosso foco está nas interfaces que determinam se sua articulação será suave, silenciosa e repetível, para que o ajuste do seu software continue sendo significativo.
Deseja uma revisão técnica de DFM?
Envie seus arquivos STEP e os principais requisitos. Nossos engenheiros analisarão suas interfaces críticas e compartilharão feedback prático sobre usinagem/inspeção.
Perguntas frequentes
Pergunta frequente 1: Quais são os problemas mecânicos que mais frequentemente causam instabilidade nas articulações dos robôs humanóides?
Os mais comuns são o desalinhamento dos dados nos assentos dos rolamentos, erros na relação entre o furo e a face, microfolga devido a encaixes instáveis e não linearidade do atrito causada pelo acúmulo geométrico.
Pergunta frequente 2: Concêntricidade versus excentricidade — o que devo especificar para os furos dos rolamentos?
Se sua prioridade é o comportamento rotacional na interface montada, os controles relacionados ao desvio angular estão frequentemente mais diretamente ligados ao desempenho. Para pilhas complexas, use uma estratégia de referência que reflita a montagem real e o método de medição.
Pergunta frequente 3: Por que o jitter só aparece depois que o robô aquece?
As mudanças de temperatura podem alterar os ajustes de interferência, a pré-carga e o comportamento de atrito. Mesmo pequenas variações térmicas podem introduzir micromovimentos ou alterar a ondulação do torque, que o controlador amplifica sob alto ganho.
Pergunta frequente 4: Como a usinagem CNC pode reduzir a oscilação relacionada ao acionamento harmônico ou à caixa de engrenagens?
A usinagem de precisão pode reduzir a oscilação, estabilizando o alinhamento entre os assentos dos rolamentos, os suportes da caixa de engrenagens e as interfaces de saída, reduzindo o atrito excêntrico, o emperramento e a ondulação de torque que excitam o circuito de controle.
Pergunta frequente 5: Os projetos com paredes finas podem realmente ser usinados sem empenamento?
Sim, com a fixação correta da peça, os percursos de ferramenta e a sequência sensível ao estresse. A viabilidade das paredes finas depende da geometria, da liga, da estratégia de nervuras e da rigidez funcional necessária.
Pergunta frequente 6: O que devo enviar para obter uma análise DFM útil para peças de robôs humanóides?
Envie o STEP + desenho (ou intenção de acoplamento), detalhes do rolamento/acionamento, método de montagem, faixa de temperatura de operação e destaque seus dados e superfícies críticos para a junta para controle de excentricidade/folga.