DFM on motion-critical features
We separate cosmetic surfaces from bearing seats, dowel datums, shaft journals, and robot mounting interfaces before quoting.
HDProto machines industrial robot parts from aluminum, stainless steel, alloy steel, brass, bronze, POM, and PEEK. We focus on the details that keep robots moving cleanly: bearing fits, dowel datums, shaft runout, EOAT weight, cable channels, burr control, and stable inspection down to +/-0.01 mm where the design and material allow.

The hard part is rarely just hitting one dimension. On robot parts, I watch the stack: bearing bores, dowel holes, shaft runout, burrs near cable paths, and the way anodize or plating changes a fitted surface. These are the parameters we ask buyers and engineers to define early.
Used on controlled features after DFM review. Not every surface needs the tightest number.
Bearing seats, sealing faces, and sliding surfaces are specified separately from cosmetic faces.
Inside corner radius depends on tool diameter, depth, material, and chatter risk.
Chosen around wear, corrosion, friction, electrical needs, and masking risk.
| Part Type | Common Materials | Features to Control | Inspection Method |
|---|---|---|---|
| Robot joint housings | 6061-T6, 7075-T6, 17-4 PH | Bearing bore H7, dowel holes, bolt circle, face flatness | CMM report, bore gauge, datum check |
| Drive shafts and sleeves | 304, 316, 4140, 42CrMo | Runout, journal diameter, keyway position, thread quality | Dial indicator, micrometer, thread gauge |
| EOAT gripper jaws | 7075-T6, 6061-T6, POM, PEEK | Weight, grip surface, repeatable jaw spacing, edge break | Functional fit check and surface review |
| Robot adapter plates | Aluminum, stainless steel, alloy steel | Dowel-to-bore position, perpendicularity, tapped holes | CMM position report and plug gauges |
| Cable and sensor brackets | Aluminum, stainless steel, ABS, POM | Slot width, bend clearance, burr-free cable paths | Visual, gauge, and assembly checks |
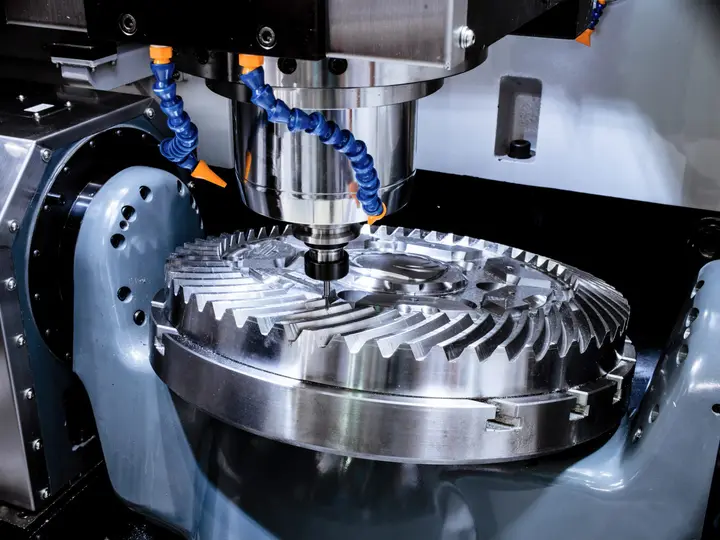
5-axis and 3-axis milling for joint housings, lightweight links, adapter plates, EOAT frames and sensor-ready structures with controlled datum strategy.
Explore Milling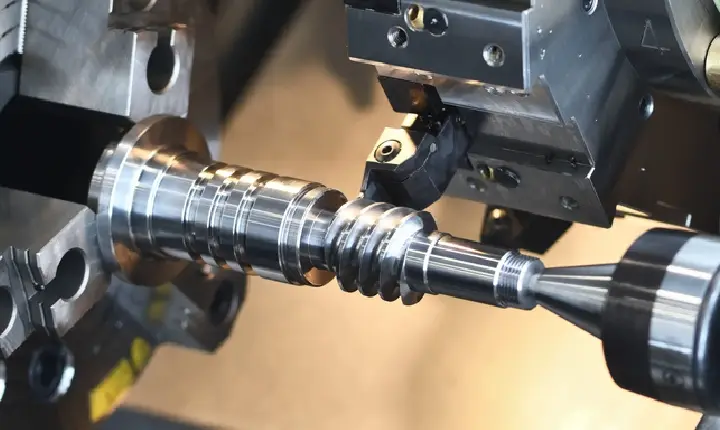
Live-tool turning for drive shafts, sleeves, pins, spacers, bushings and concentric robot components where runout and thread quality matter.
Explore Turning
Hard anodize, electroless nickel, black oxide, passivation, bead blasting and polishing planned around fits, masks, burrs and assembly risk.
Explore FinishesWe separate cosmetic surfaces from bearing seats, dowel datums, shaft journals, and robot mounting interfaces before quoting.
Robot assemblies punish weak datum planning. We build the first operation around surfaces that locate the part in the final machine.
Deep pockets and lightweight arms are roughed with enough stock and rest time when needed so the finish pass is not chasing movement.
Bearing bores, dowel holes, shaft journals, and mounting faces get controlled finish tools, tool-life rules, and inspection checkpoints.
EOAT jaws, cable slots, and sensor brackets need smooth edges, but bearing shoulders and datum faces cannot be rounded carelessly.
Hard anodize, nickel, black oxide, and passivation are planned with masking or pre-finish allowances where fits can change.
For industrial robot parts, the best RFQ includes more than a STEP file. Add a drawing that marks bearing fits, dowel holes, shaft runout, surface finish, anodize or plating masks, and any edges that contact cables, belts, fingers, or sensors.
Industrial robot parts are machined and assembled components used in robot motion, tooling, sensing, mounting, and protection systems. Typical CNC parts include joint housings, adapter plates, drive shafts, gripper jaws, EOAT frames, cable brackets, spacers, bushings, and precision mounting hardware.
Aluminum 6061 and 7075 are common for lightweight EOAT and arms. Stainless steel and alloy steel suit shafts, high-load adapters, and wear parts. Brass, bronze, POM, and PEEK work well for bushings, low-friction elements, insulation, or sensor-adjacent parts.
Send STEP files, 2D drawings, material grade, quantity, surface finish, critical tolerances, bearing or dowel fit requirements, thread standards, assembly photos if available, and notes about robot model, load, operating environment, and expected production volume.